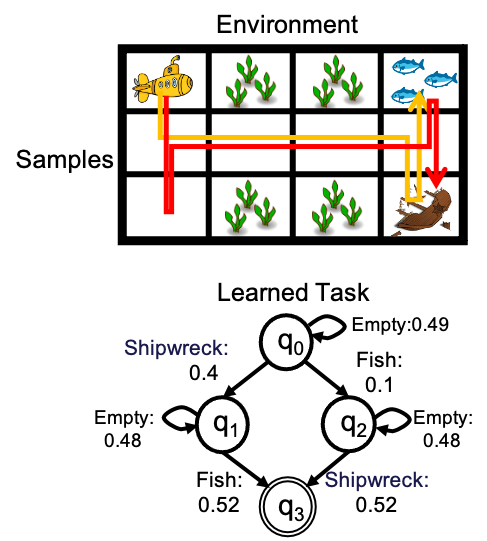
August 07, 2021 Task Learning with Preferences for Planning with Safety Constraints
Learn task specifications from demonstrations along with preferences
November 11, 2019 Suppression of Virtual Reality Sickness on Drone
Developed a drone controller that aims to suppress the movement that may induce the virtual reality sickness.

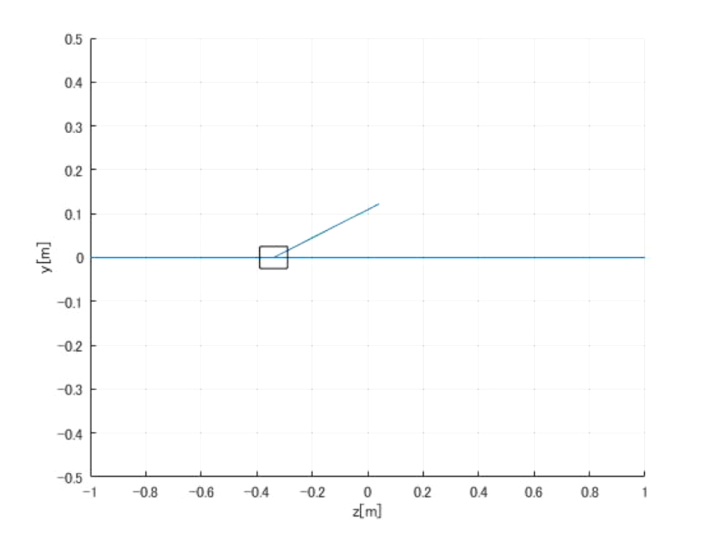
November 11, 2019 Simulation of Inverted Pendulum using a simple neural network
Simulation of Inverted Pendulum using Neural Network.
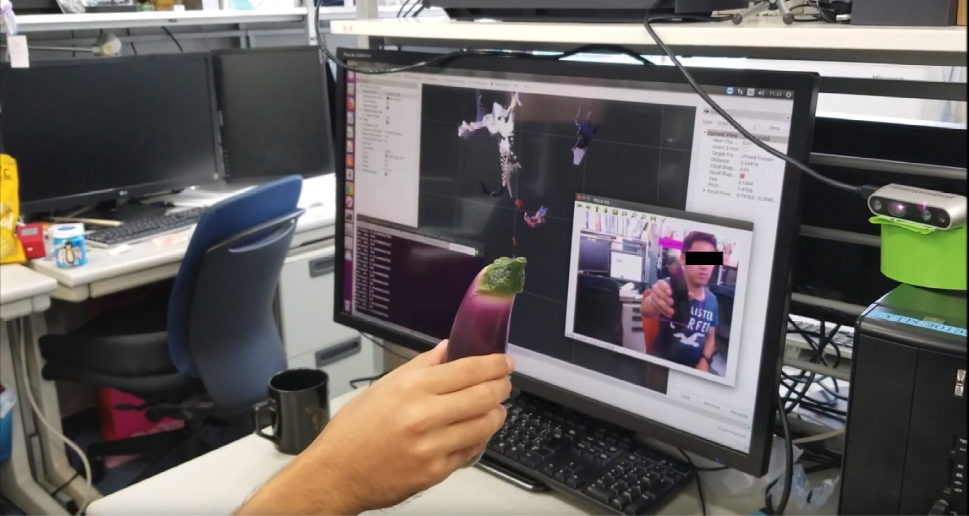
November 11, 2019 Image Recognition of an Eggplant for Manipulation Task
Implemented a convolutional neural network to detect an eggplant.
November 11, 2019 Action Acquisition using Bayesian Optimization
Learn a primitive motion from learning from demonstration and adapt to an environment using Bayesian Optimization to accomplish a task with a relatively small number of iterations