Task Learning with Preferences for Planning with Safety Constraints
Task Learning with Preferences for Planning with Safety Constraints
K. Watanabe, N. Renninger, S. Sankaranarayanan, and M. Lahijanian, “Probabilistic Specification Learning for Planning with Safety Constraints,” in IEEE/RSJ International Conference on Intelligent Robots and Systems, 2021. (accepted) K. Watanabe, N. Renninger, S. Sankaranarayanan, and M. Lahijanian, “Task Learning with Preferences for Planning with Safety Constraints,” in Workshop on Accessibility of Robot Programming and the Work of the Future, 2021.
Objective
- Propose a framework for learning task specifications from demonstrations and planning with safety guarantees
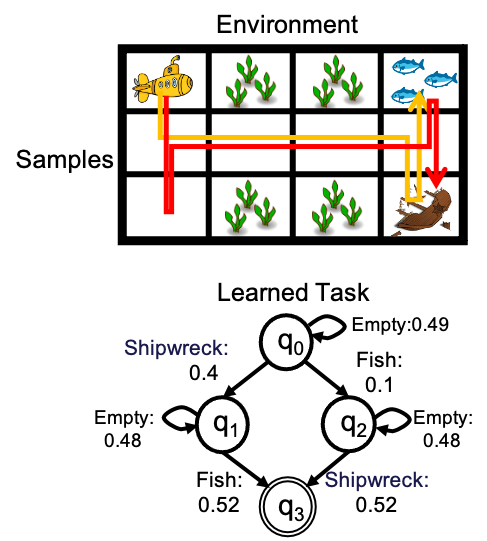
- Learn specifications as automata and preferences as probabilities
- Embed safety constraints in the learning process, which improves learning and mitigates reliance on hyper-parameter tunning
- Introduce planning algorithm for the most preferred plan that achieves the learned task